前回の記事から5ヶ月経ちました。
その後の経過を報告します。
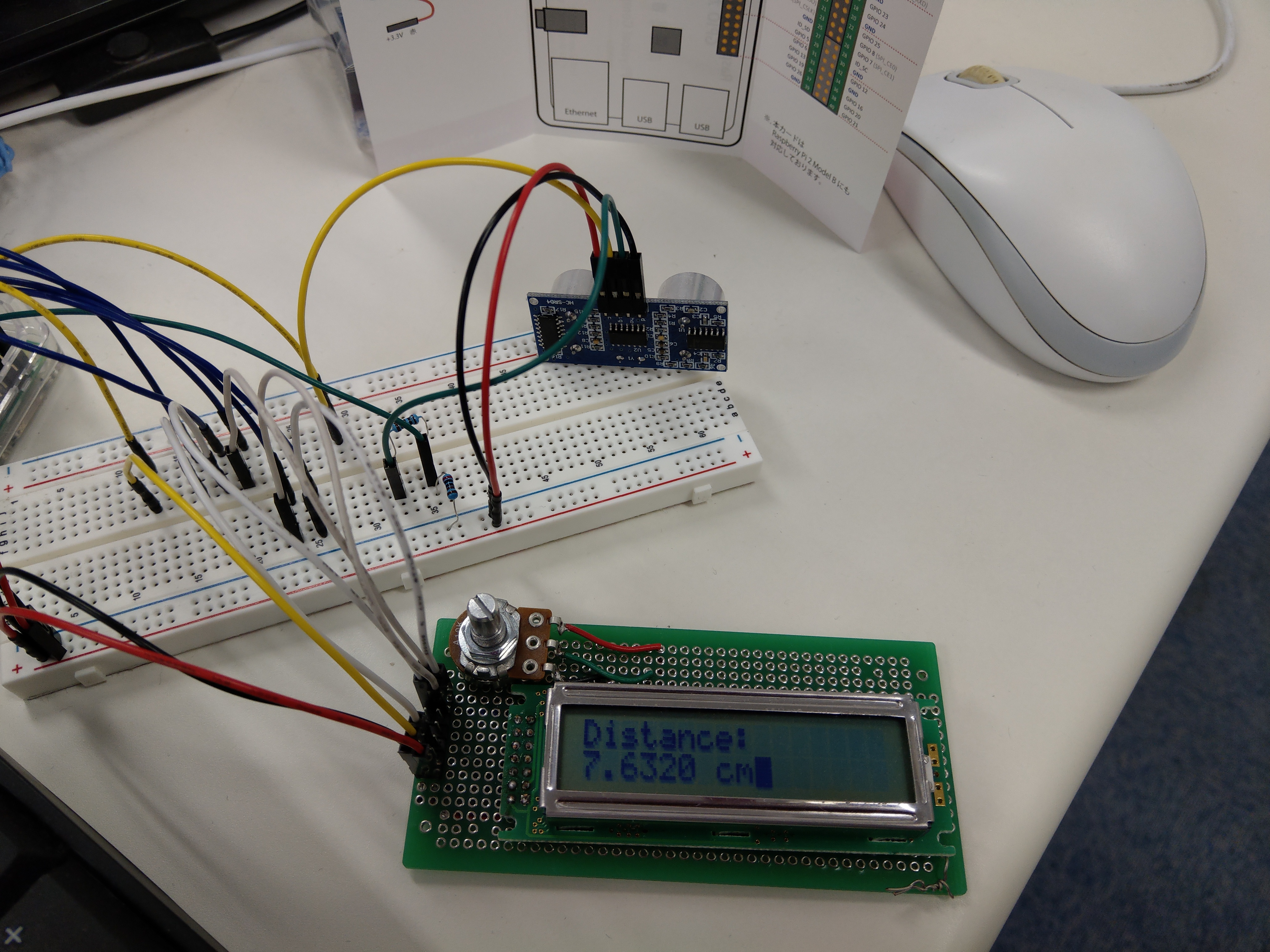
超音波センサー
前回は、うまく動かなったので同じやつを買い直しました。
買い直したら正常に動いたので、多分前のやつが壊れていたっぽいです。
ライントレーサー
なんやかんやあって、ライントレーサーを作ることになりました。
簡単に説明すると、線を辿って走る車です。
http://www.cct.ac.jp/mech/yume2/yume2.htm
ライントレーサーを作るために、必要なパーツはこれだと思います。
- DRV8835使用ステッピング&DCモータドライバモジュール
- モーターの回転速度を制御するために利用します。
- DCモーター FA-130RA-2270
- 照度センサ(フォトトランジスタ) 560nm NJL7502L
- 照度センサは、明るさを検知するセンサーです。
- 電池ボックス 単3×2本 リード線・スイッチ付
- 10bit 2ch ADコンバータ MCP3002-I/P
モーターと照度センサを単体で動かしてみました。
照度センサで明るさを検知して、明るいか暗いか出力させることが出来ました。
モーターは、ドライバモジュールを売ってなかったので、とりあえず動くかどうかの確認はしました。
フレーム部分を必要だったので、モーターとフレームがセットになっているキットが、売っていたのでそれを買いました。
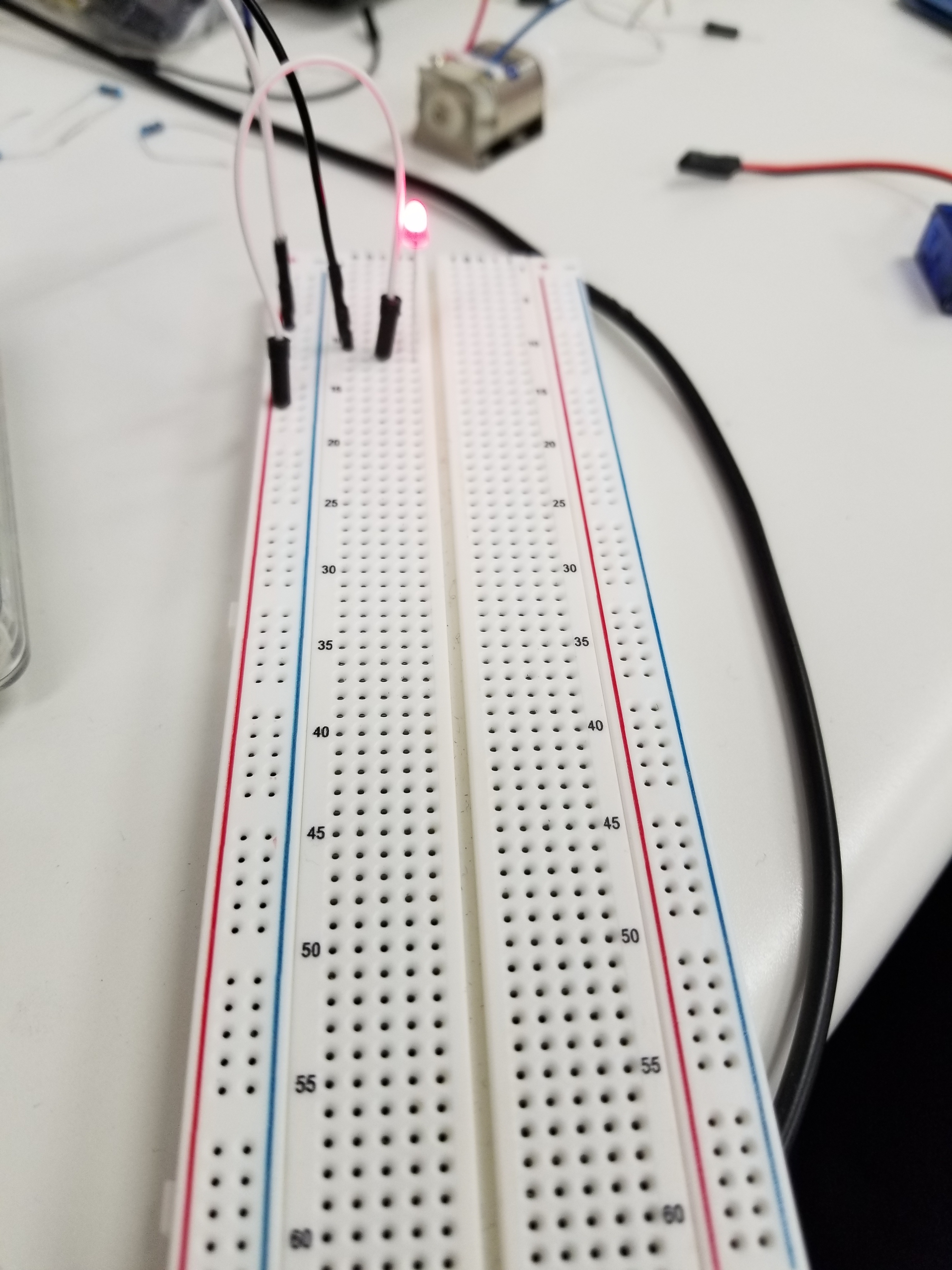
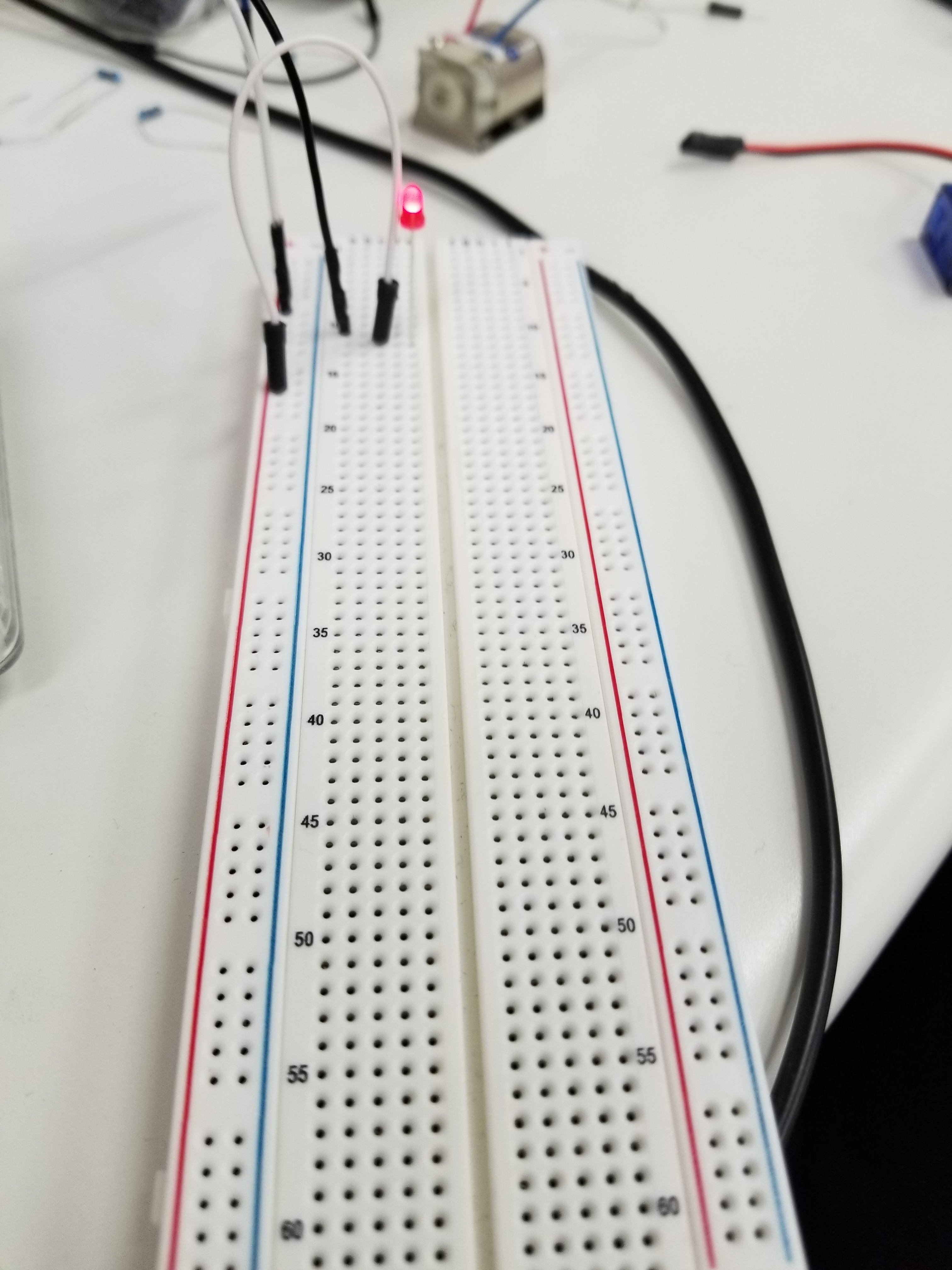
モーターの制御にPWM制御が必要だったので、とりあえずLEDで試しました。
PWMとはこちら
from time import sleep
import wiringpi as pi
gpio_pin1 = 14
pi.wiringPiSetupGpio()
pi.softPwmCreate(gpio_pin1,0,100)
while (1):
pi.softPwmWrite(gpio_pin1,100)
sleep(1)
pi.softPwmWrite(gpio_pin1,10)
sleep(1)1秒おきに、明るさの出力加減を調整しています。
左が明るい時で、右が暗い時です。
今後は、引き続きライントレーサーを作っていきます。